



Are you want to be an Electronic Geek in the future and want to build your own drone then this Flight controller is best for you. The flight controller uses the data gathered by the sensors to calculate the desired speed for each of the four motors. The flight controller sends this desired speed to the Electronic Speed Controllers (ESC’s), which translates this desired speed into a signal that the motors can understand. This flight controller
APM 2.8 Multicopter Flight Controller is an upgraded version of 2.5 and 2.6 with a Built-in Compass for FPV RC Drone. The sensors are exactly the same as the APM 2.6 flight controller. However, the module has the option to use the built-in compass an external compass via a jumper. This makes the APM 2.8 ideal for use with multi-copters and rovers.
The APM 2.8 Multicopter Flight Controller is a complete open source autopilot system. This is the best-selling technology that won the prestigious Outback Challenge UAV competition. It allows the user to turn any fixed, rotary-wing. In addition, it turns multirotor vehicles (even cars and boats) into a fully autonomous vehicle. meanwhile, it is capable of performing programmed GPS missions with waypoints.
To Explore more Flight Controllers, Click here
To Calibrate APM 2.8 flight controller Using Mission planner, Click here

APM Flight controller Using the built-in compass:
To use the built-in compass simply connect the jumper as shown below. The APM board will use the external compass, during the compass jumper is removed.

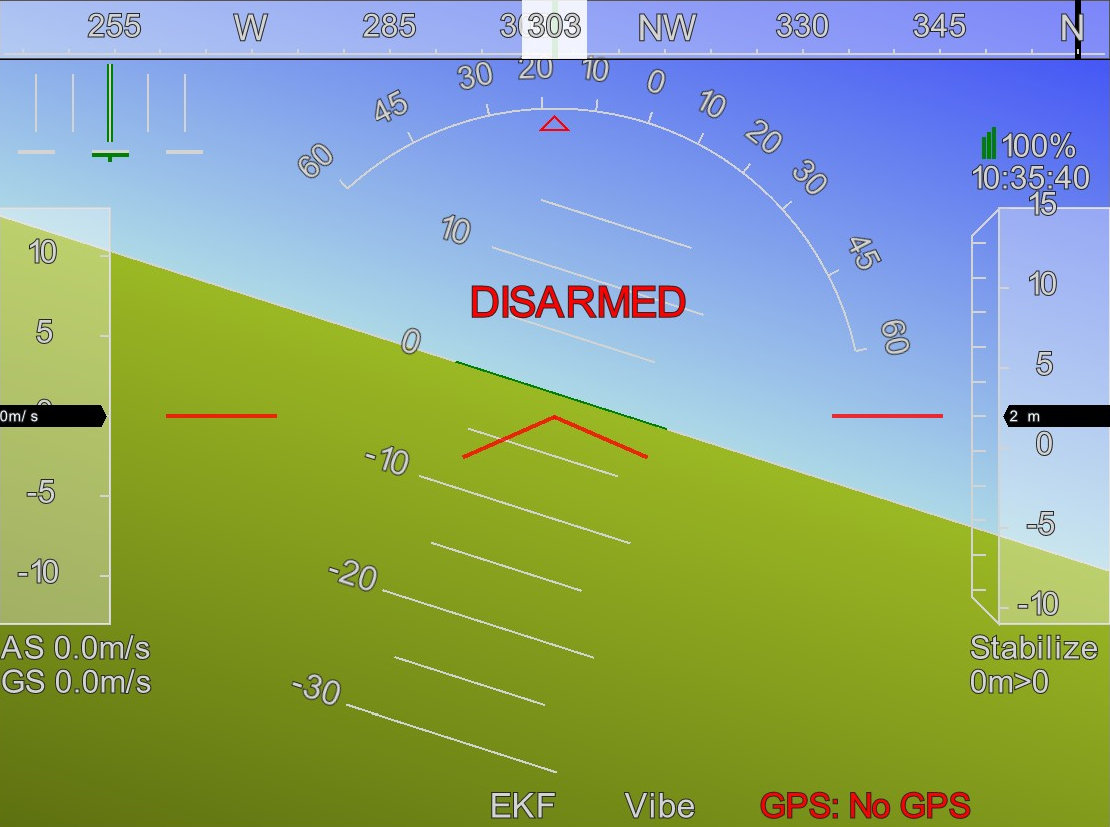
Powerful ground control software features:
The downloadable mission planner software is used to configure and control your APM board:
- Point-and-click waypoint entry, using Google Maps.
- Select mission commands from drop-down menus.
- Download mission logs files and analyzes them.
- Configure APM settings for your airframe.
- Interface with a PC flight simulator to create a full hardware-in-the-loop UAV simulator.
- See the output from APM’s serial terminal.
Features :
- Straight Needle
- Arduino Compatible
- Onboard 4 MegaByte Dataflash chip for automatic data logging.
- Optional off-board GPS, a uBlox LEA-6H module with Compass.
- One of the first open-source autopilot systems to use Invensense’s 6 DoF Accelerometer/Gyro MPU-6000.
- Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties.
- Atmel’s ATMEGA2560 and ATMEGA32U-2 chips for processing and USB functions respectively.
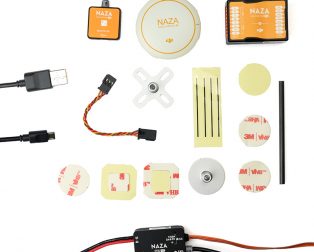
Package Includes :
1 x APM 2.8 Multicopter Flight Controller.
2 x Connecting Wires.







{kind=link}
Sunil Yadav (verified owner) –
good flight controller
Sunil Yadav –
Sunil Yadav (verified owner) –
flight controller good price 4940
Sunil Yadav –
Thavamani Thavamani –
nice but heigh value
Thavamani Thavamani –
sp37610 (verified owner) –
good product in low price
stable flight
sp37610 –
Ravi kumar (verified owner) –
Excellent product and fast shipping
Very good don’t hesitate to buy
Ravi kumar –
Parveen Kumar (verified owner) –
Good flight controller for amateur aerial photography. So far i have tested position hold, altitude hold and RTL flight modes. Performed very well. Good value for money.
Parveen Kumar –
DHIRENDRA MALLIK (verified owner) –
Good quality work very fine
DHIRENDRA MALLIK –
[email protected] –
better stability performance
[email protected] –
[email protected] –
this item is god quality and small I really like it
[email protected] –
SUJEET KUMAR YADAV –
I have purchased this from ebay.in & after using it from 1 year I will say that it is trustworthy & very stable flight controller.
SUJEET KUMAR YADAV –
[email protected] (verified owner) –
Open source flight controller. Easy to use & set up.
[email protected] –
Sunjay Singh (verified owner) –
If you are making a quad or hexa, this is the controller for you, dont forget if your ESC have 5 volts on red wires, remove the JP1 it joins the power module and BEC circuits, if JP1 is in place and esc also powering 5v, you will fry the controller instantly, it comes with inbuilt compass as well! Happy flying
Sunjay Singh –
Prashant Salian (verified owner) –
Although I have yet to check the APM using actual motors and ESCs, the initial calibration results returned positive. I am pretty sure it will remain the same in practice too.
Prashant Salian –
Prashant (verified owner) –
Although I have yet to check the APM using actual motors and ESCs, the initial calibration results returned positive. I am pretty sure it will remain the same in practice too. Overall a very good product!
Prashant –
[email protected] (verified owner) –
I am not sure this APM is original or copy. But it is reasonable.
[email protected] –
Vishal Mehra (verified owner) –
Great product!
Vishal Mehra –