Today we’ll be showing you how to make your own discord bot and host it on Raspberry Pi 5 seamlessly. Before we begin, we need few perquisites like basic knowledge... Read More

Today we’re going to build an Handheld Dino Game based using Raspberry Pi Pico. Also we’ll be using a 20X4 LCD Display so that we have plenty of screen space. Along with... Read More

Enter the world of Minecraft with the power of Raspberry pi 5,Each of us has used this method to test the system’s performance, that is, to install a high-end game... Read More
Everyone wants to work on raspberry pi 5 and importantly to know about the OS and how that OS installations work and here is the answer for your search in... Read More
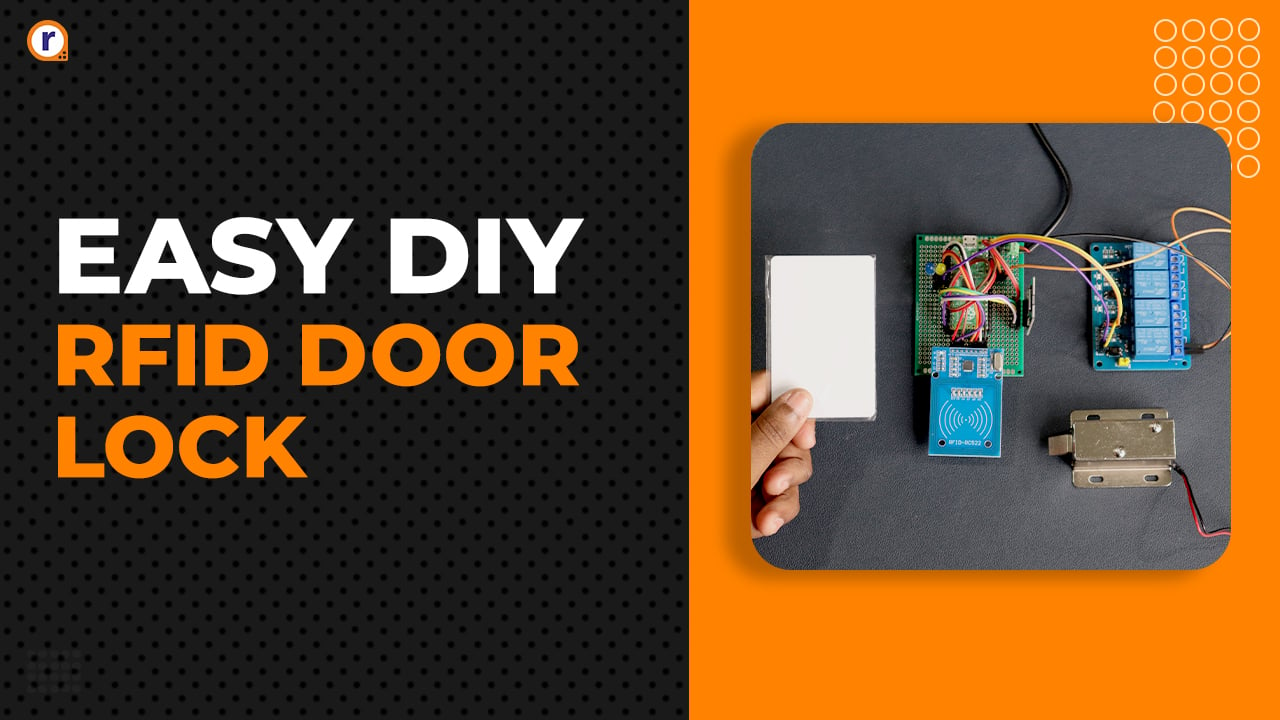
Today we’re going to build an RFID Door Lock based using Raspberry Pi Pico. Also we’ll be storing all the RFID Card’s code locally on a SD card for easy... Read More

Today we are going to build an IOT Enabled Energy Meter using Raspberry Pi Pico and Arduino Nano so that we can monitor energy consumed from anywhere. We’ll be using... Read More
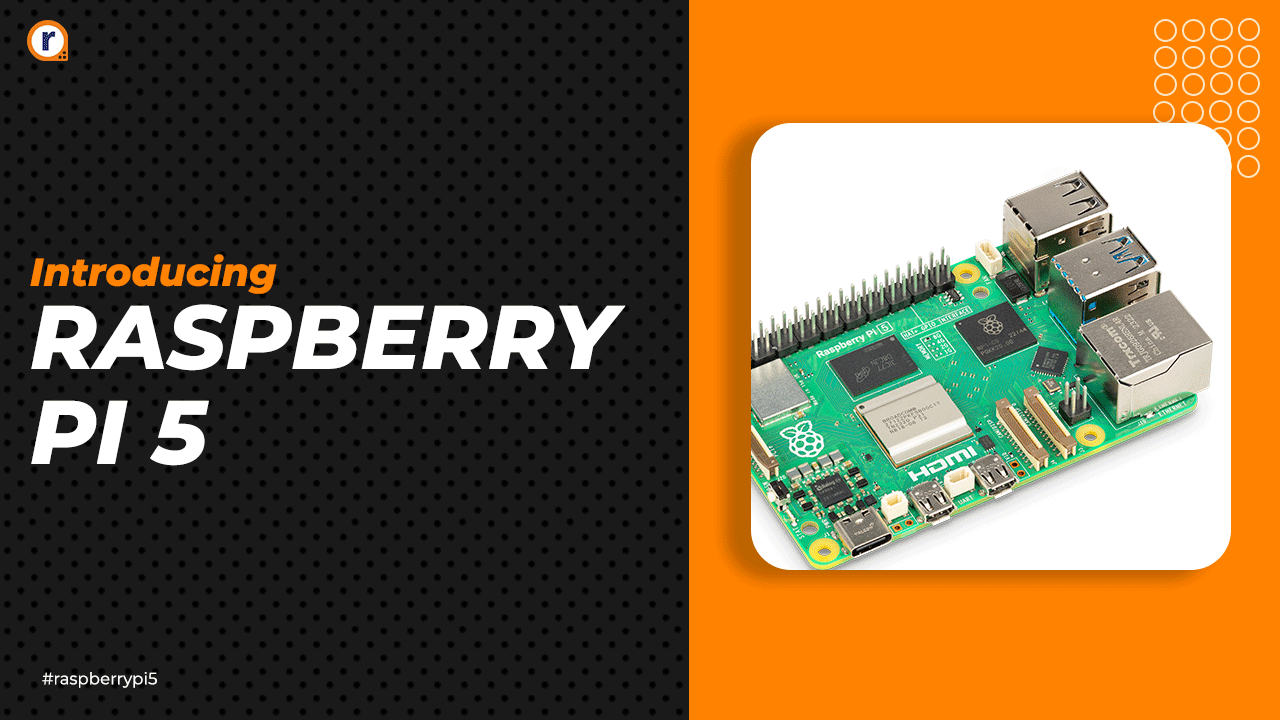
Step into a future brimming with excitement and opportunity as RPI unveils the highly anticipated Raspberry Pi 5 model. This launch is a rollercoaster ride of revolution and creativity.... Read More
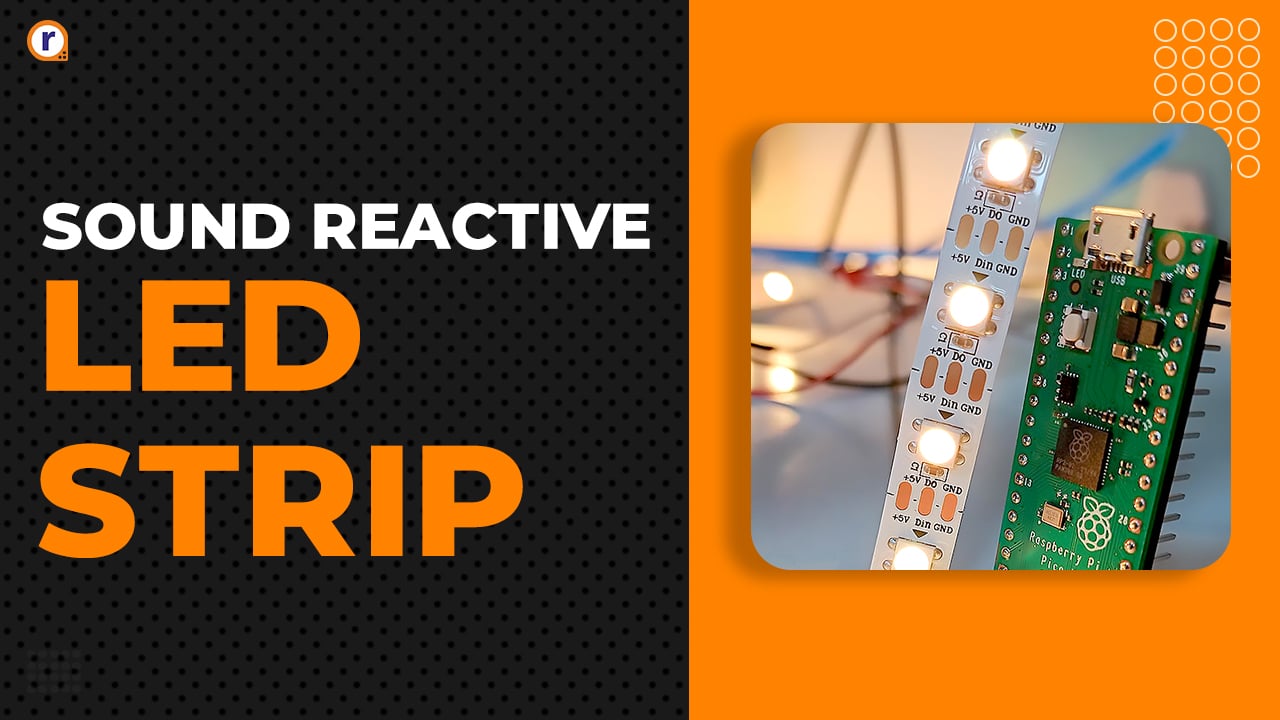
Led strips are a popular lighting solution for a variety of application like enhancing ambience of room, provide additional lighting in photography and do eye-catching lighting in festivals. The led... Read More

Are you ready to capture the perfect shot with the newest addition to the Raspberry Pi family? Introducing the new Raspberry Pi Global Shutter Camera, designed to take photos and... Read More